Device functions
- registration of searched model
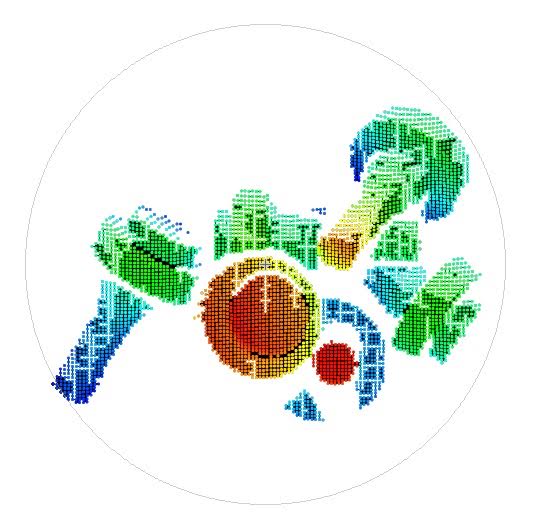
- acquiring the point cloud of the search area
- program lookup of the registered model in the workspace
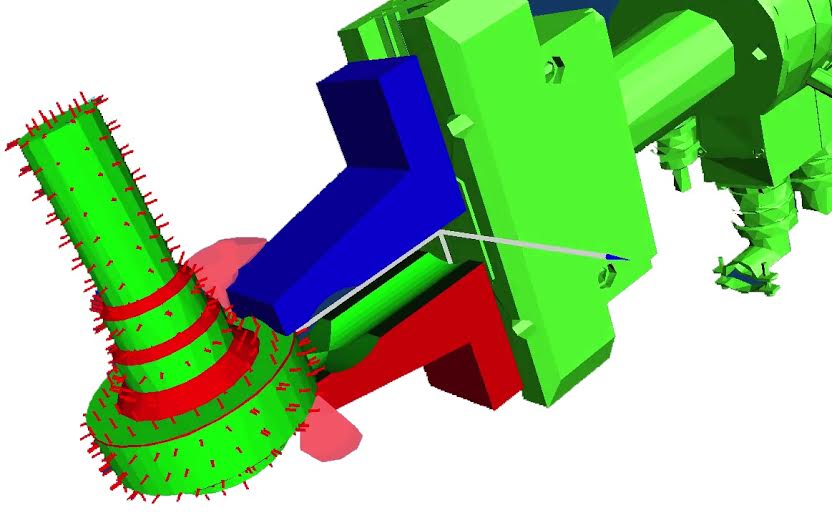
- acquiring the position and rotation of the object in 3D space with a designated place for object gripping using the robotic manipulator and its imposition into required space
- automatic generation of robotic manipulator trajectory for reliable and secure gripping and unloading

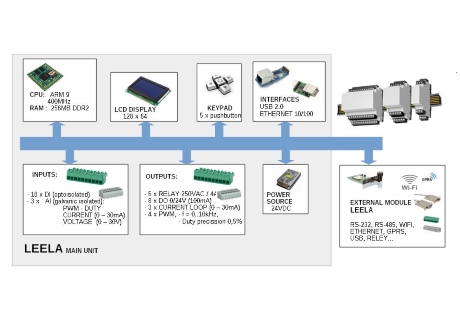
SPACEYE subsystems
- Subsystem of preparing and implementing the model of a real object
- Subsystem of localization and determining the gripping place of the object (product) of various sizes and shapes in 3D space in a heap of randomly arranged objects (products), including functional safety module – Safety.
- Subsystem of gripping and subsequent imposition of the object (product) of various sizes and shapes from the heap of randomly arranged objects in 3D space